to increase your lead.
cost-efficient & time-saving
Rapid Control Prototyping
As an essential part of the mechatronic development methodology, rapid control prototyping enables the time- and cost-efficient implementation of developed control and regulation software on a powerful hardware platform.
Our products include universally applicable RCP-ECUs, optionally with integrated power electronics, for near-series model-based software development in MATLAB/Simulink or dSPACE TargetLink.
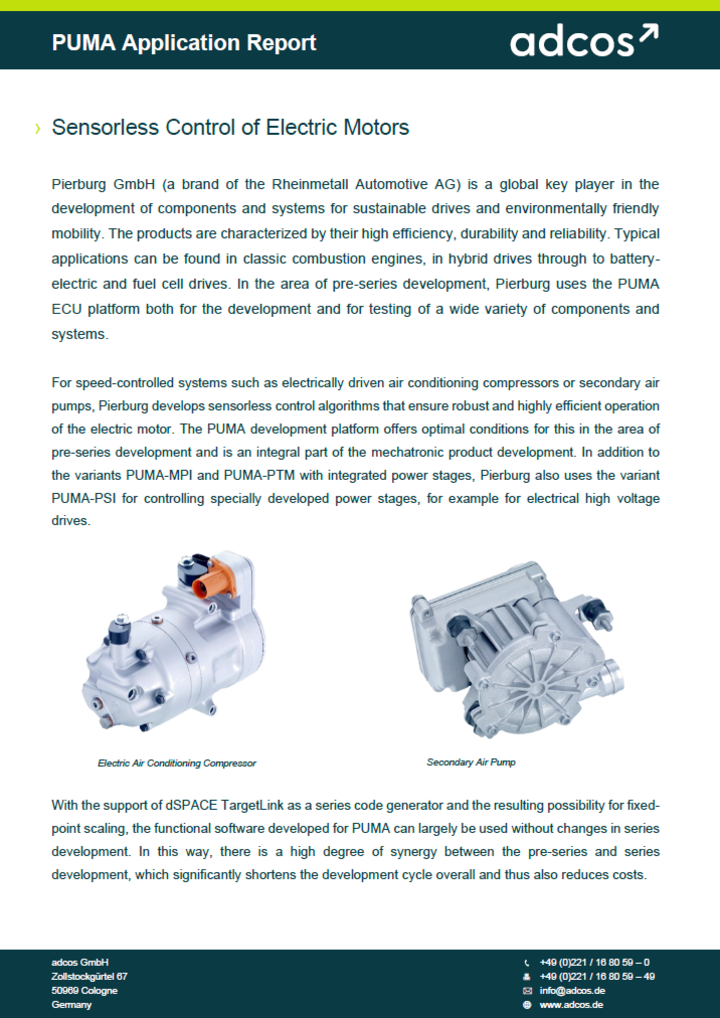
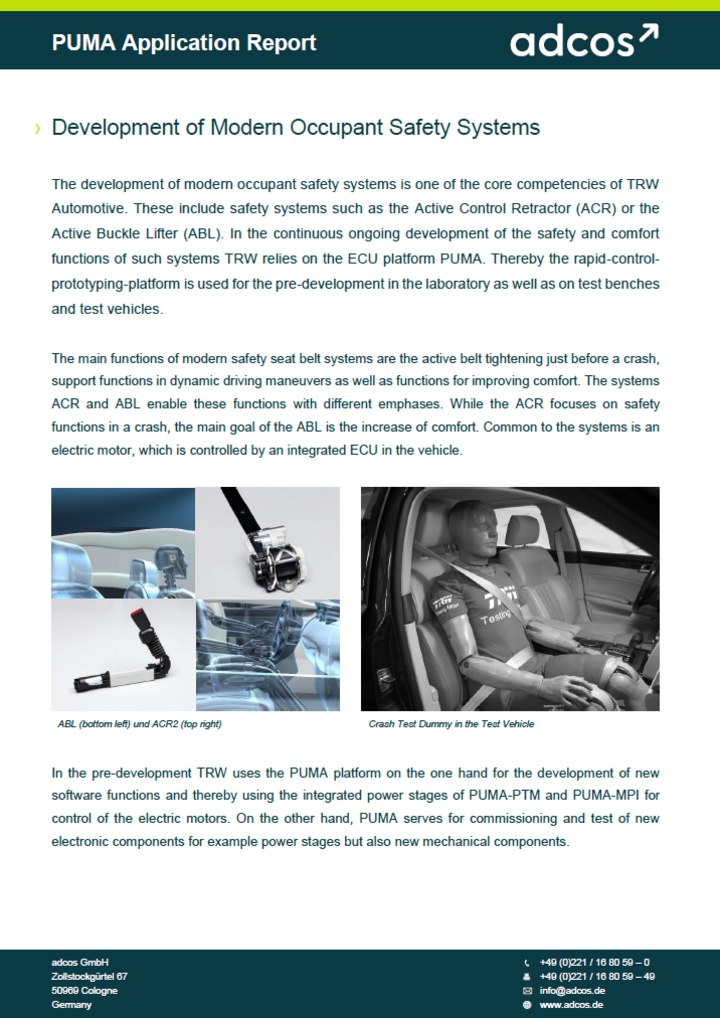
Thanks to optionally integrated power output stages, our products are suitable for controlling different electrical actuators such as synchronous and asynchronous motors, DC motors or valves.

PUMA (without power amplifier)
Universally applicable development platform, also for field tests with larger test fleets, at an attractive price/performance ratio.

PUMA-MPI (with Motor Power Inverter)
PUMA-MPI has an integrated high-current power output stage for the operation of electronically commutated 3-phase motors.

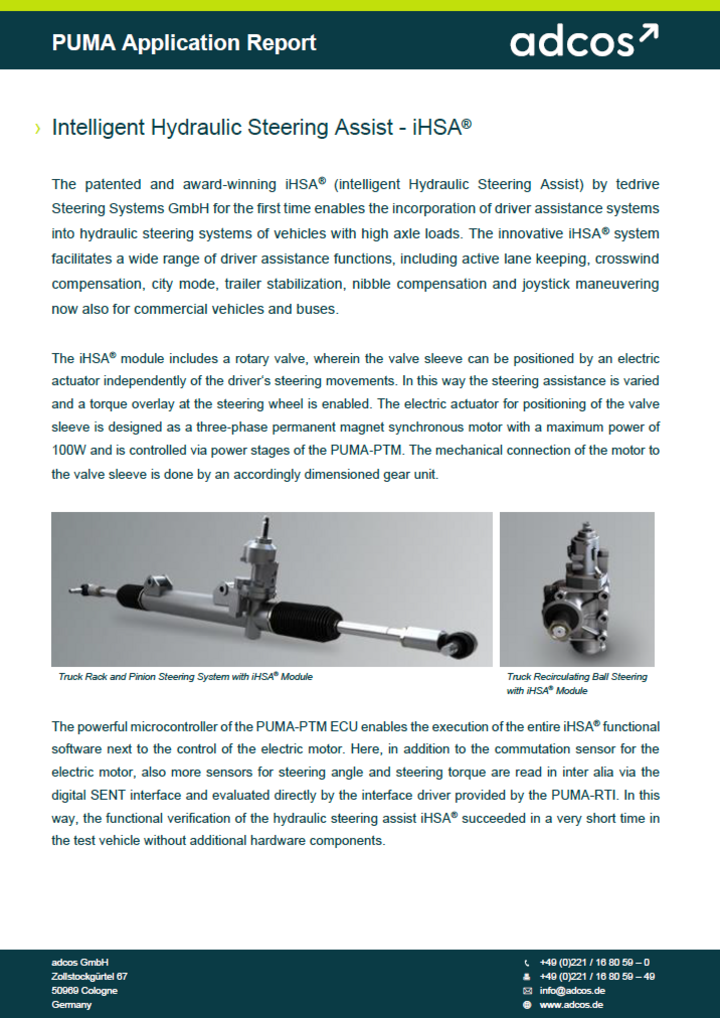
PUMA-PTM (with Power Transistor Module)
PUMA-PTM offers a power output stage with 4 identical high-power half-bridges and 4 identical low-power half-bridges. Perfect for controlling a wide variety of electrical actuators.

PUMA-PSI (with Power Stage Interface)
PUMA-PSI offers an integrated interface for controlling external power output stages and high-voltage output stages.

PUMA Software
Customer application that is model-based developed with MATLAB/Simulink or dSPACE TargetLink and implemented by auto code generation.
Application reports
In our application reports you will find out where our rapid control prototyping platforms are already being used successfully.
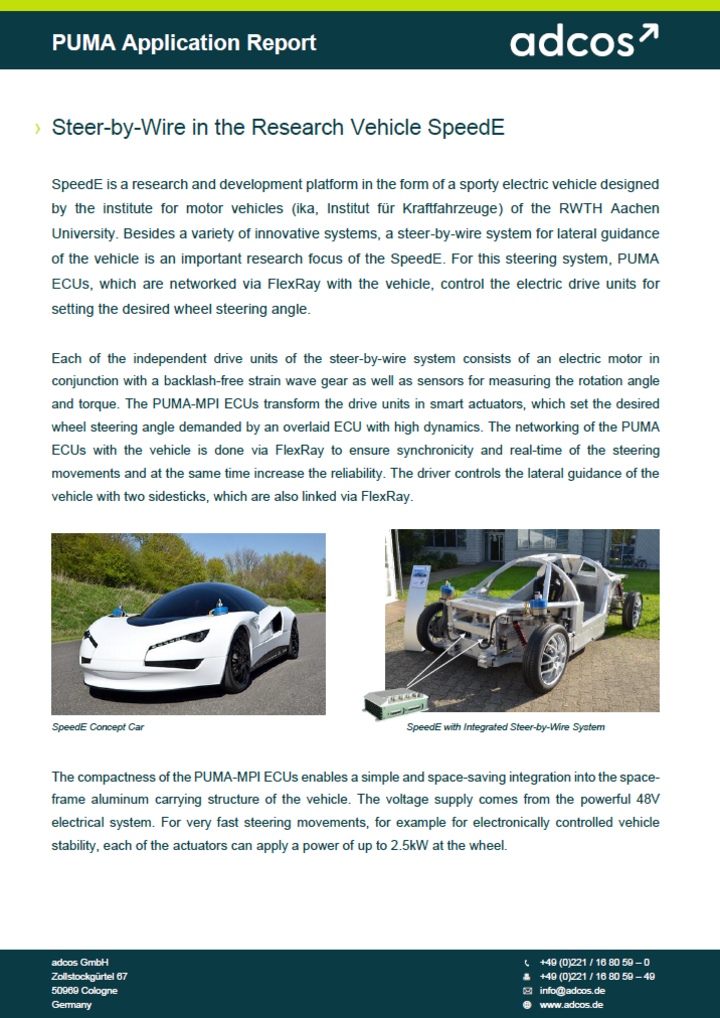
See PUMA in action
The impressive autonomous steering maneuvers are controlled with the adcos PUMA-MPI hardware.

Key features
- Powerful dual-core automotive microcontroller
- Extensive digital and analogue I/O as well as communication interfaces CAN / FlexRay / LIN
- Nominal voltage range 12 - 48 V
- Software development and autocode generation with MATLAB/Simulink or dSPACE TargetLink
- Easy interface configuration via graphical user interface in MATLAB
- Application according to ASAP2 via XCP on Ethernet (with "adcos CMI" or "Vector CANape")
The PUMA-MPI variant (PUMA logic control unit with integrated Motor Power Inverter) has an integrated high-current power output stage for the operation of electronically commutated 3-phase motors. This power output stage is equipped with numerous sensors for measuring all relevant voltages, currents and temperatures. In addition, a pre-charging stage, reverse polarity protection and an EMC filter are integrated.

Key features
- B6 bridge
- Constructed from 3 discrete half-bridges
- Parallel connected Mosfets for increased current carrying capacity
- Rated current motor phases: +/-150 A
- Maximum motor phase current: +/-240 A
- Sensors
- Currents and voltages: U, V, W phases and DC link
- Temperatures: PCB to U, V, W phase
- DC link
- Rated voltage range: 12 - 48 V
- Maximum allowable voltage range: 7 - 58 V
- Pre-charge stage, reverse polarity protection and EMC filter
The PUMA-PTM variant (PUMA logic control unit with power transistor module) offers an integrated power output stage with 4 identical high-power half-bridges and 4 identical low-power half-bridges for controlling a wide variety of electrical actuators. All relevant voltages, currents and temperatures are measured. Pre-charging stage, reverse polarity protection and EMC filter are also integrated.

Key features
- 4 identical high-power half-bridges:
- can be combined e.g. as H bridges or B6 bridges
- Rated Current/Maximum Current: +/-50A
- 4 identical low-power half-bridges
- can be combined e.g. as H bridges or B6 bridges
- Rated Current/Maximum Current: +/-7.5 A
- sensors
- Currents and voltages: half-bridges, low-side switches and DC link
- Temperatures: PCB at three thermally relevant locations
- DC link
- Rated voltage range: 12 - 48 V
- Maximum allowable voltage range: 7 - 58 V
- Pre-charge stage, reverse polarity protection and EMC filter
The PUMA-PSI variant (PUMA logic control unit with Power Stage Interface) offers an integrated interface for controlling external power amplifiers. The interface is implemented using configurable PWM outputs for controlling the power semiconductors and PWM-synchronous analog inputs for current and voltage measurement. Due to the complete galvanic isolation of the interface, PUMA-PSI is also suitable for controlling high-voltage power amplifiers. The software development and configuration of the interface takes place as usual in MATLAB / Simulink.

Key features
- 8x2 PWM outputs (each low and high) for controlling a total of 8 half bridges
- 8 PWM synchronously triggered analog inputs for current and voltage measurement
- Ideally suited for software development and testing of electrical drive units (inverter and motor)
- Complete galvanic isolation of all inputs and outputs of the power stage interface
- SW configurable PWM frequency from 100Hz to 100kHz
- SW configurable inverter dead times to avoid short circuits
- SW-configurable measurement times for PWM synchronously triggered analog inputs
- Specification of the duty cycles and tri-states for each half bridge from Simulink
- Configuration of the entire interface with PUMA-RTI
- Unit of account identical to PUMA
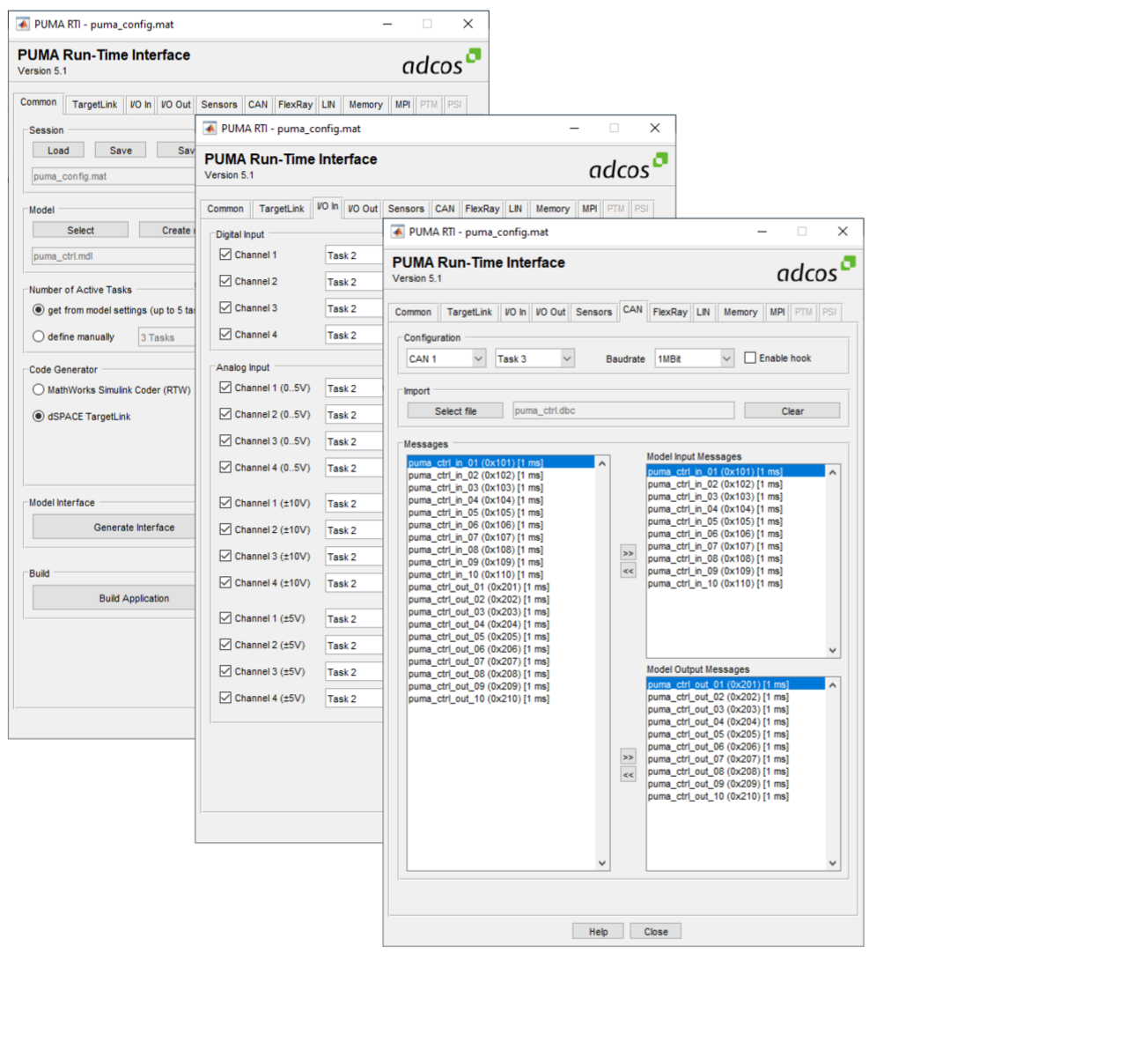
Key features
- Configuration of the entire I/O
- Configuration of the power electronics
- CAN, FlexRay and LIN configuration by importing DBC, FIBEX and LDF files
- Generation of the Simulink interface blocks / Addition to the TargetLink DD
- Autocode generation with SimulinkCoder or TargetLink at the push of a button
- Simple and intuitive operation
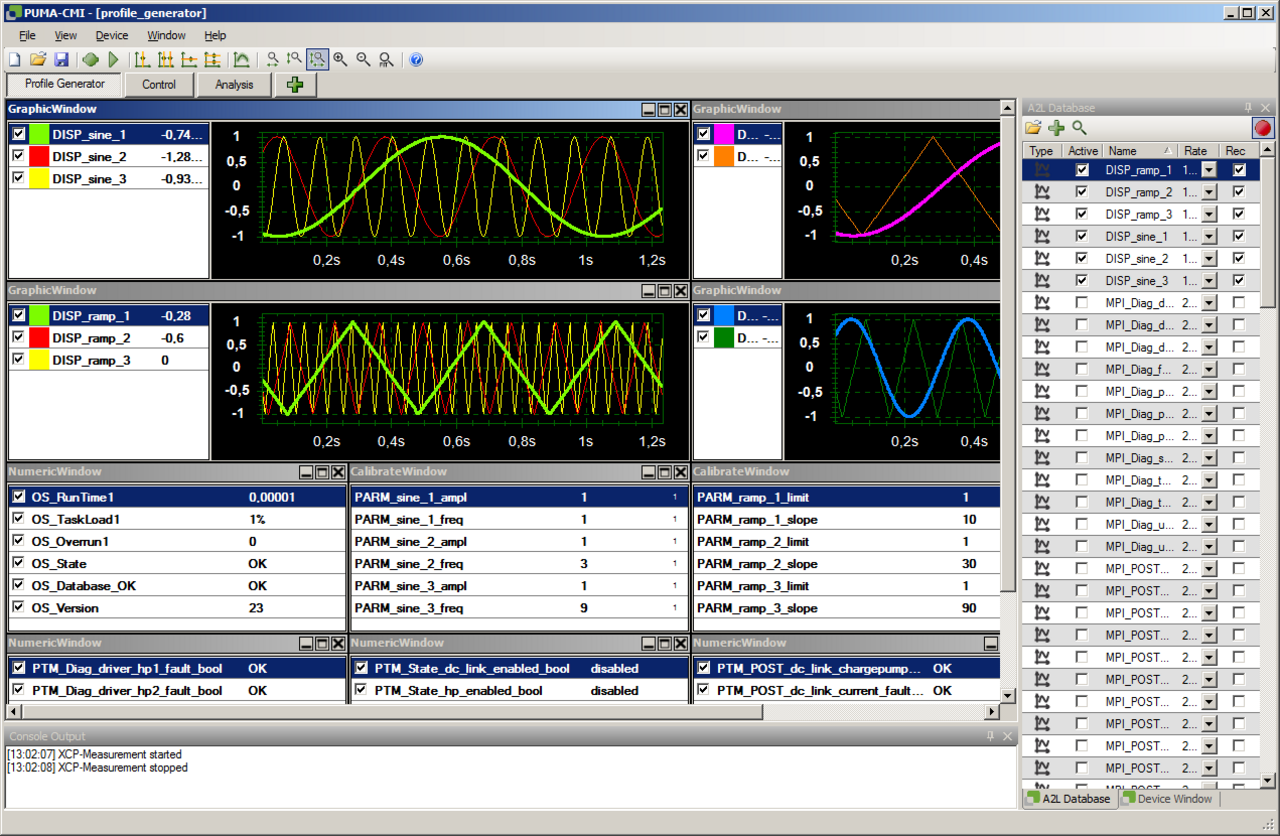
Key features PUMA-CMI
- Calibration and measurement via XCP-on-Ethernet
- Visualize and record data at up to 5kHz
- Saving measurement data in HDF5 format (also supported by MATLAB)
- Free design of user interfaces
- API for automation purposes e.g. with MATLAB or Python
- Saving and loading of parameter sets
- Additional measurement tools (cursors, statistical functions)
- Simple and intuitive operation