um Ihren Vorsprung auszubauen.
kosteneffizient & zeitsparend
Rapid Control Prototyping
PUMA - die universell einsetzbare Rapid Control Prototyping Platform
Rapid Control Prototyping ermöglicht als wesentlicher Bestandteil der mechatronischen Entwicklungsmethodik die zeit- und kosteneffiziente Realisierung entwickelter Steuer- und Regelungssoftware auf einer leistungsfähigen Hardwareplattform.
Zu unseren Produkten gehören universell einsetzbare RCP-ECUs, optional mit integrierter Leistungselektronik, für die seriennahe modellbasierte Softwareentwicklung in MATLAB/Simulink oder dSPACE TargetLink.
Durch optional integrierte Leistungsendstufen sind unsere Produkte für die Ansteuerung unterschiedlicher elektrischer Aktuatoren wie beispielsweise Synchron- und Asynchronmotoren, DC-Motoren oder Ventile geeignet.

PUMA (ohne Leistungsendstufe)
Universell einsetzbare Entwicklungsplattform auch für Feldversuche mit größeren Versuchsflotten zu einem attraktiven Preis-/Leistungsverhältnis.

PUMA-MPI (mit Motor Power Inverter)
PUMA-MPI verfügt über eine integrierte Hochstrom-Leistungsendstufe für den Betrieb von elektronisch kommutierten 3-phasigen Motoren.

PUMA-PTM (mit Power Transistor Module)
PUMA-PTM bietet eine Leistungsendstufe mit 4 identischen High-Power Halbbrücken und 4 identischen Low-Power Halbbrücken. Perfekt für die Ansteuerung unterschiedlichster elektrischer Aktuatoren.

PUMA-PSI (mit Power Stage Interface)
PUMA-PSI bietet eine integrierte Schnittstelle zur Ansteuerung externer Leistungsendstufen und Hochspannungs-Endstufen.

PUMA Software
Kundenapplikation, die modellbasiert mit MATLAB/Simulink oder dSPACE TargetLink entwickelt und durch Autocodegenerierung implementiert wird.
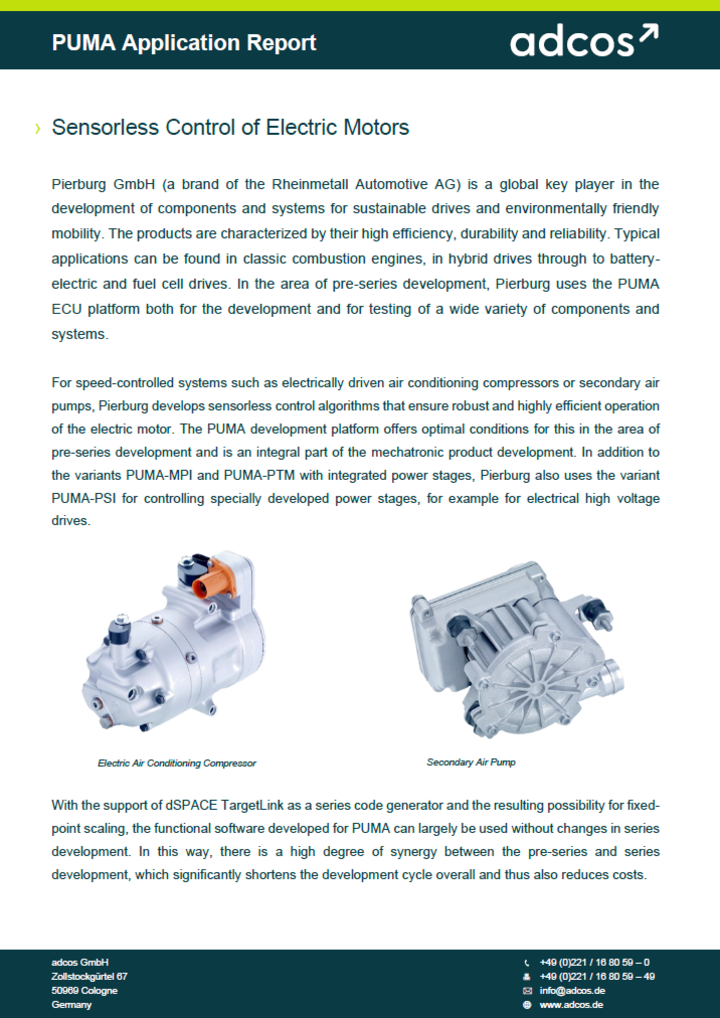
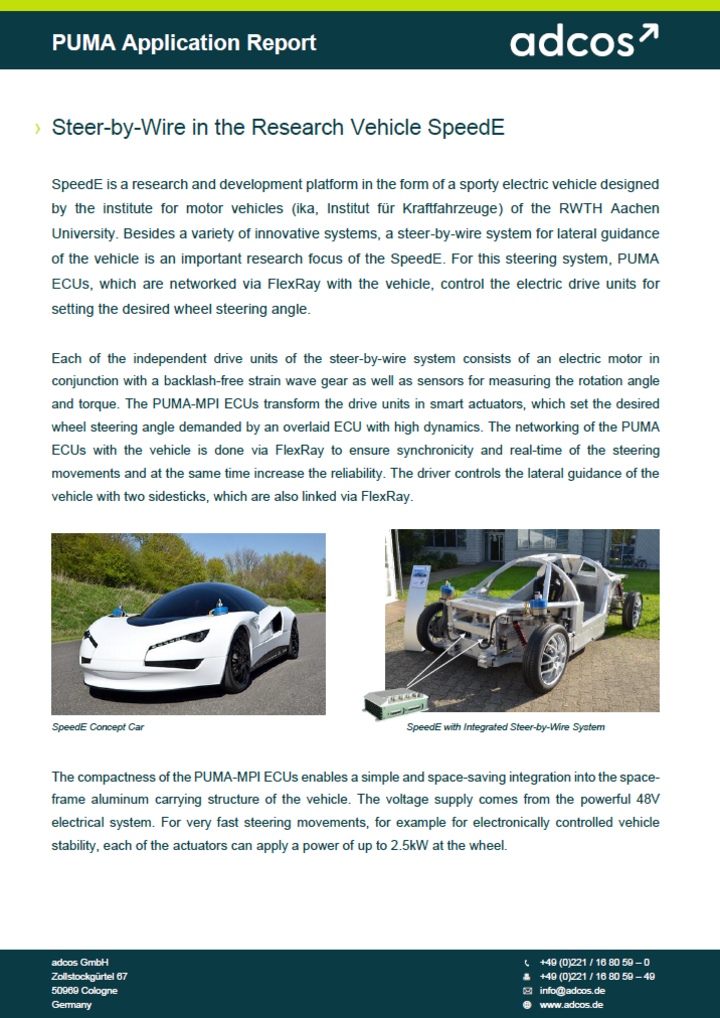
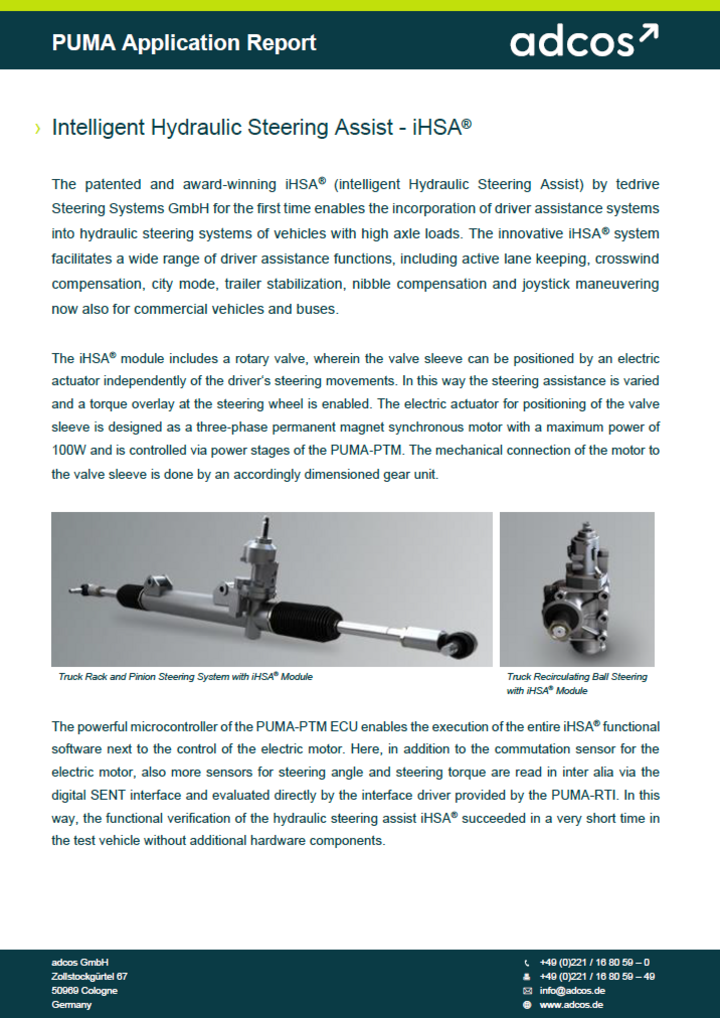
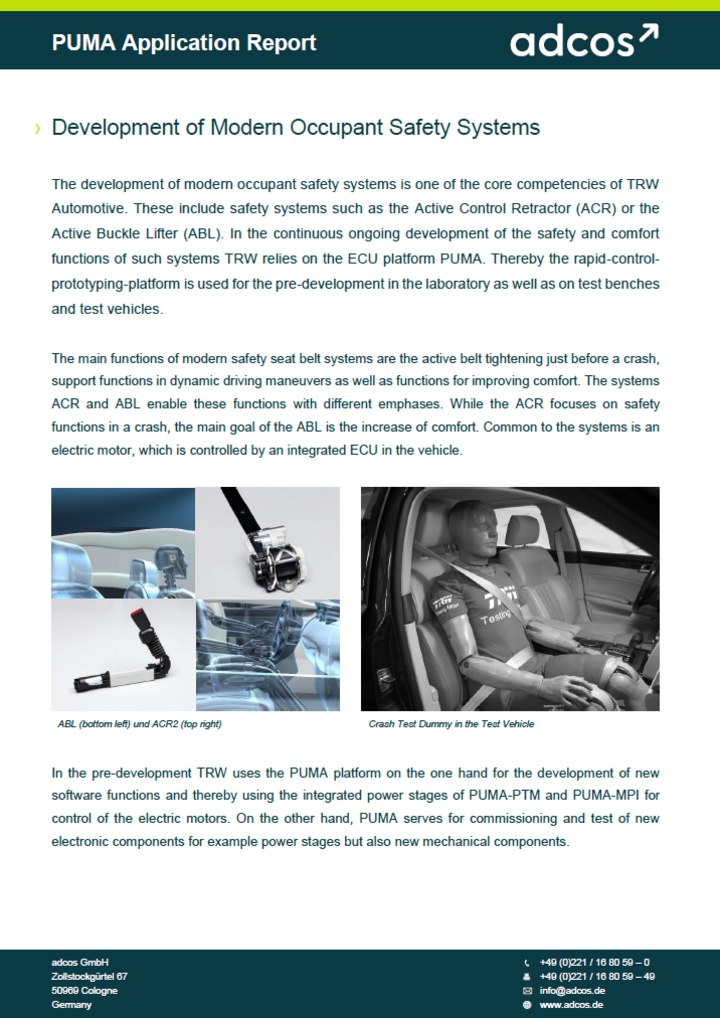
Anwendungsberichte
In unseren Anwendungsberichten erfahren Sie, wo unsere Rapid Control Prototyping Plattformen bereits erfolgreich eingesetzt werden.
Erleben Sie PUMA im Einsatz
Die beeindruckenden autonomen Lenkmanöver werden mit der adcos PUMA-MPI Hardware gesteuert.
PUMA - Prototyping Unit for Modelbased Applications
Mit PUMA bieten wir Ihnen eine universell einsetzbare Rapid-Control-Prototyping-Plattform, optional mit integrierter Leistungselektronik, für die seriennahe modellbasierte Softwareentwicklung mit MATLAB/Simulink oder dSPACE TargetLink.

Key Features
- Leistungsstarker Dual-Core Automotive Microcontroller
- Umfangreiche Digital- und Analog-I/O sowie Kommunikationsschnittstellen CAN / FlexRay / LIN
- Nennspannungsbereich 12 - 48 V
- Softwareentwicklung und Autocodegenerierung mit MATLAB/Simulink oder dSPACE TargetLink
- Einfache Schnittstellenkonfiguration über grafische Benutzeroberfläche in MATLAB
- Applikation nach ASAP2 über XCP on Ethernet (mit "adcos CMI" oder "Vector CANape")
PUMA-MPI mit Motor Power Inverter
Die Variante PUMA-MPI (Logiksteuergerät PUMA mit integriertem Motor Power Inverter) verfügt über eine integrierte Hochstrom-Leistungsendstufe für den Betrieb von elektronisch kommutierten 3-phasigen Motoren. Diese Leistungsendstufe ist mit zahlreichen Sensoren zur Messung aller relevanten Spannungen, Ströme und Temperaturen ausgestattet. Darüber hinaus sind Vorladestufe, Verpolschutz und EMV-Filter integriert.

Key Features
- B6-Brücke
- Aufgebaut aus 3 diskreten Halbbrücke
- Parallel geschaltete Mosfets für erhöhte Stromtragfähigkeit
- Nennstrom Motorphasen: +/-150 A
- Maximalstrom Motorphasen: +/-240 A
- Sensorik
- Ströme und Spannungen: U-, V-, W-Phasen und DC-Zwischenkreis
- Temperaturen: PCB an U-, V-, W-Phase
- DC-Zwischenkreis
- Nennspannungsbereich: 12 - 48 V
- Maximal zulässiger Spannungsbereich: 7 - 58 V
- Vorladestufe, Verpolschutz und EMV-Filter
PUMA-PTM mit Power Transistor Module
Die Variante PUMA-PTM (Logiksteuergerät PUMA mit Power Transistor Module) bietet eine integrierte Leistungsendstufe mit 4 identischen High-Power Halbbrücken und 4 identischen Low-Power Halbbrücken für die Ansteuerung unterschiedlichster elektrischer Aktuatoren. Alle relevanten Spannungen, Ströme und Temperaturen werden gemessen. Ebenso sind Vorladestufe, Verpolschutz und EMV-Filter integriert.

Key Features
- 4 identische High-Power Halbbrücken:
- kombinierbar z.B. als H-Brücken oder B6-Brücke
- Nennstrom/Maximalstrom: +/-50 A
- 4 identische Low-Power Halbbrücken
- kombinierbar z.B. als H-Brücken oder B6-Brücke
- Nennstrom/Maximalstrom: +/-7.5 A
- Sensorik
- Ströme und Spannungen: Halbbrücken, Low-Side Schalter und DC-Zwischenkreis
- Temperaturen: PCB an drei thermisch relevanten Stellen
- DC-Zwischenkreis
- Nennspannungsbereich: 12 - 48 V
- Maximal zulässiger Spannungsbereich: 7 - 58 V
- Vorladestufe, Verpolschutz und EMV-Filter
PUMA-PSI mit Power Stage Interface
Die Variante PUMA-PSI (Logiksteuergerät PUMA mit Power Stage Interface) bietet eine integrierte Schnittstelle zur Ansteuerung externer Leistungsendstufen. Die Schnittstelle wird durch konfigurierbare PWM-Ausgänge zur Ansteuerung der Leistungshalbleiter und PWM-synchrone Analogeingänge zur Strom- und Spannungsmessung realisiert. Aufgrund der vollständigen galvanischen Trennung der Schnittstelle eignet sich PUMA-PSI auch zur Ansteuerung von Hochspannungs-Endstufen. Die Software-Entwicklung und Konfiguration der Schnittstelle erfolgt wie gewohnt in MATLAB / Simulink.

Key Features
- 8x2 PWM Ausgänge (jeweils Low und High) zur Ansteuerung von insgesamt 8 Halbbrücken
- 8 PWM-synchron getriggerte Analogeingänge zur Strom- und Spannungsmessung
- Ideal geeignet für Softwareentwicklung und Test von elektrischen Antriebseinheiten (Inverter und Motor)
- Vollständige galvanische Trennung aller Ein- und Ausgänge der Endstufenschnittstelle
- SW-konfigurierbare PWM-Frequenz von 100 Hz bis 100 kHz
- SW-konfigurierbare Wechselrichter-Totzeiten zur Vermeidung von Kurzschlüssen
- SW-konfigurierbare Messzeitpunkte für PWM-synchron getriggerte Analogeingänge
- Vorgabe der Tastverhältnisse und Tri-States für jede Halbbrücke aus Simulink
- Konfiguration der gesamten Schnittstelle mit PUMA-RTI
- Recheneinheit identisch PUMA
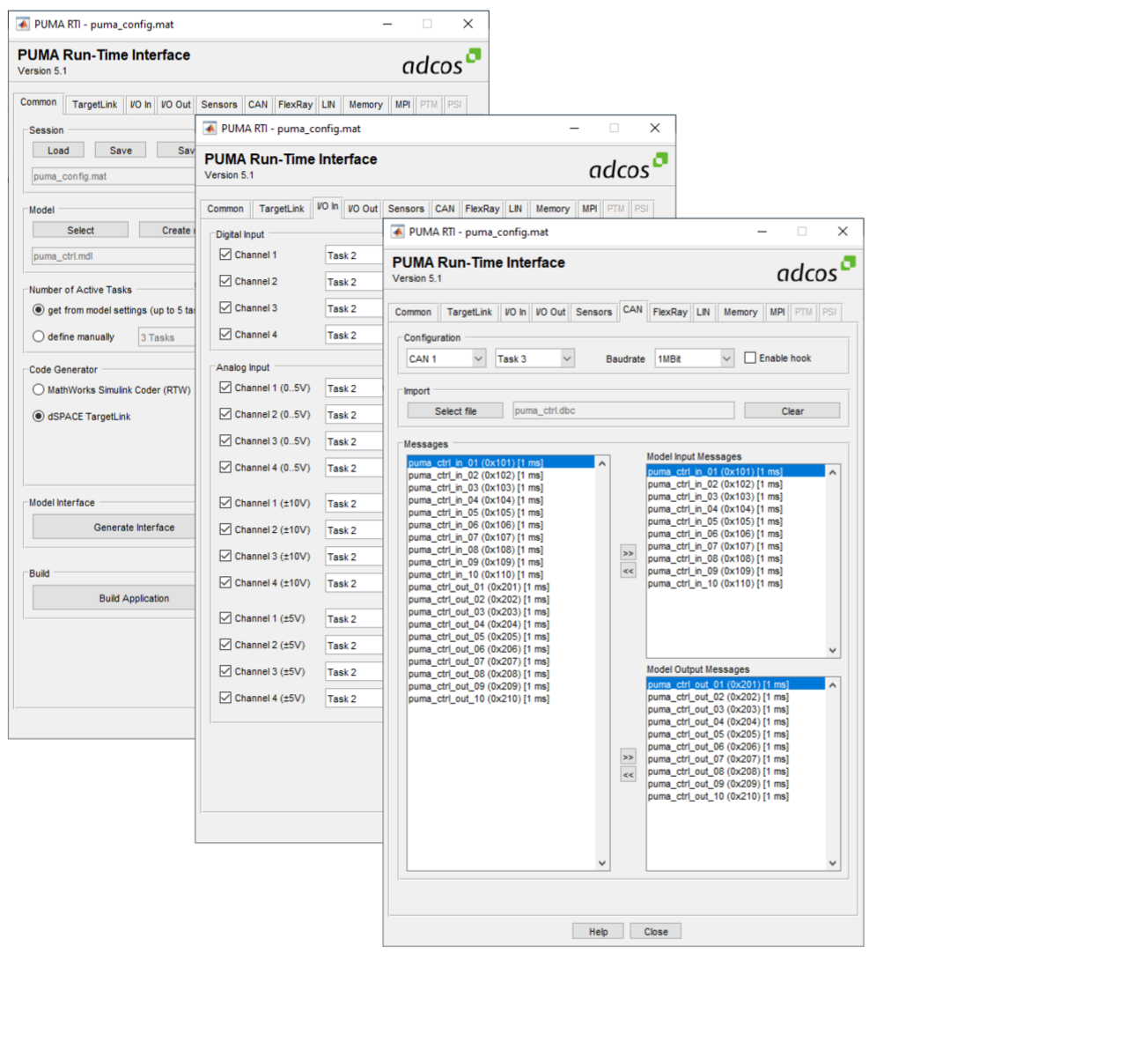
Schnittstellenkonfiguration per Mausklick
PUMA-RTI
Das Run-Time Interface (RTI) ist Teil der mitgelieferten PUMA Software und bildet die Schnittstelle zwischen der Kundenapplikation und der ebenfalls enthaltenen Basissoftware. Die Konfiguration und Generierung der Schnittstelle erfolgt komfortabel über eine grafische Benutzeroberfläche in MATLAB.
Key Features
- Konfiguration der gesamten I/O
- Konfiguration der Leistungselektronik
- CAN, FlexRay und LIN Konfiguration durch Import von DBC-, FIBEX- und LDF-Dateien
- Generierung der Simulink-Schnittstellenblöcke / Ergänzung des TargetLink DD
- Autocodegenerierung mit SimulinkCoder oder TargetLink per Knopfdruck
- Einfache und intuitive Bedienung
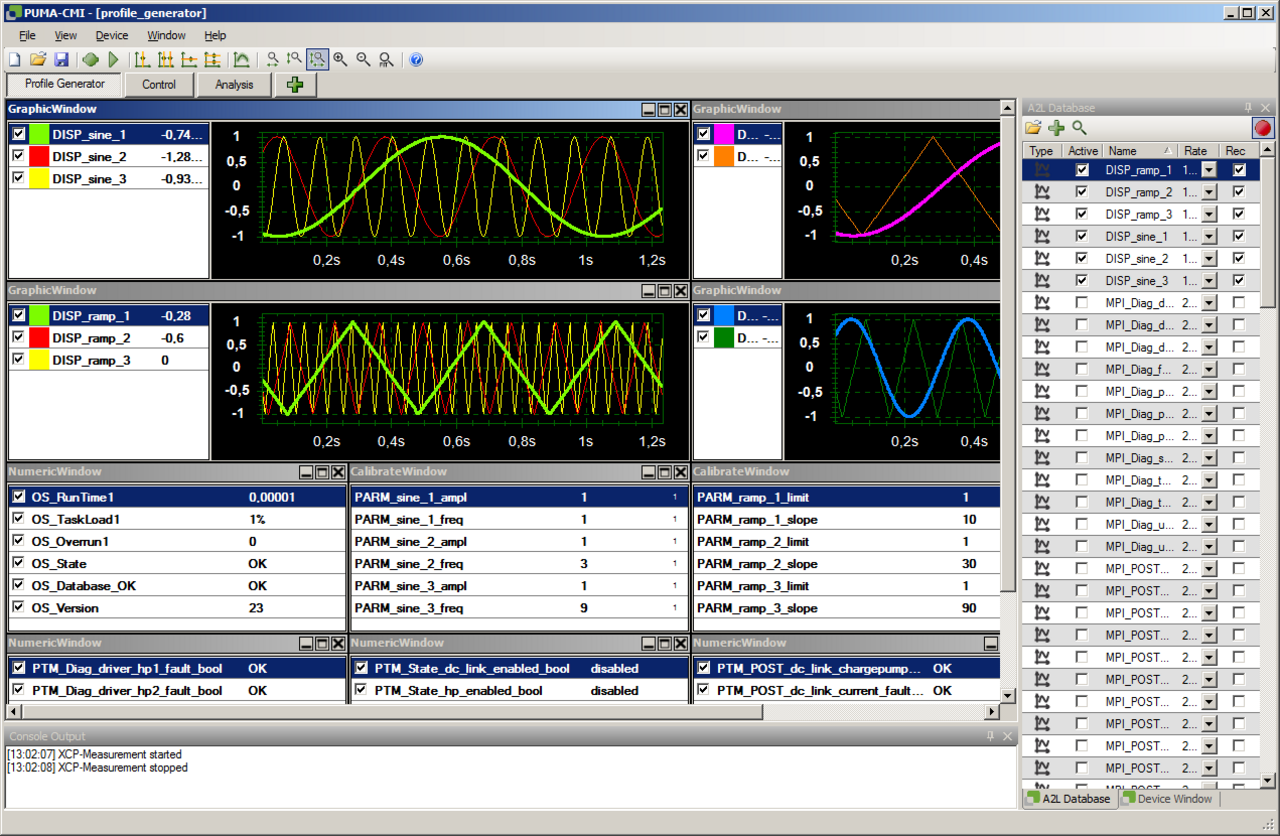
Kalibrieren und Messen per Ethernet
PUMA-CMI
Das Calibration and Measurement Interface (CMI) ist ebenfalls im Lieferumfang der PUMA Software enthalten. Damit können Parameter online kalibriert sowie Daten visualisiert und aufgezeichnet werden können. Die Verbindung zwischen Host-PC und PUMA Hardware erfolgt über eine Ethernet Verbindung.
Key Features
- Kalibrieren und Messen via XCP-on-Ethernet
- Datenvisualisieren und -aufzeichnen mit bis zu 5kHz
- Abspeichern von Messdaten im HDF5-Format (wird ebenfalls von MATLAB unterstützt)
- Freie Gestaltung von Benutzeroberflächen
- API für Automatisierungszwecke z.B. mit MATLAB oder Python
- Speichern und Laden von Parametersätzen
- Zusätzliche Messwerkzeuge (Cursor, Statistikfunktionen)
- Einfache und intuitive Bedienung
PUMA im Praxiseinsatz
Alle Videos im Überblick
Sentient.
The Autonomous Royal Crown